Highlighting JAPAN

自分で触っているような、リアルな感覚を伝えるロボットアーム
ポテトチップをつまみ上げるといった、従来のロボットが苦手とする「力加減」が可能なロボットアームが開発された。物に触れた感覚を人に伝えることが可能で、アバター(自分の分身となるロボット)、触覚のある義手などへの応用も期待されている。
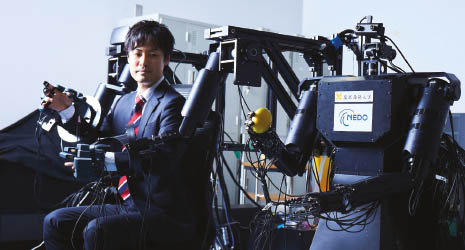
慶應義塾大学理工学部システムデザイン工学科専任講師の野崎貴裕さんたちが開発した双腕型ロボット「General Purpose Arm(GP-Arm)」は、ポテトチップを指先でつまんだり、水風船を割らないように持つことができる。従来のロボットにはとても難しいこれらの動作ができるのは、人間のような“力加減”ができるからである。
GP-Armはロボットアームの「スレーブ」と人間が操作する「マスター」から成る。ロボットアームが物をつかむと、その感覚はマスターを操作する人間の指先に伝わり、マスター側で力加減を調整できる。スレーブに取り付けたカメラの映像をマスター側のHMD(ヘッドマウントディスプレイ)で見ることも可能で、操作者が脚に力を入れるとマスターの足元に設置された筋収縮測定システムがこれを検知し、ロボットが前後に移動する。離れた場所にいる人間が、まるでその場所にいて自分自身で物に触って動かしているような感覚を得られるのである。
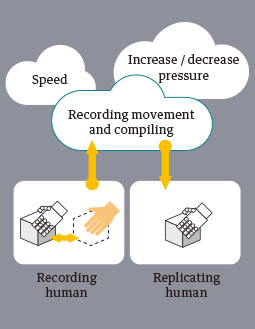
触覚を伝える仕組みは、2002年に大西公平特任教授(当時教授)が世界で初めて実現したハプティクス(触覚)技術「加速度規範双方向制御方式」がコアになっている。ロボットアームが物に触れたり押したりした時の“力触覚”を瞬時に信号化する技術で、力がかかったときのモーターの回転力(トルク)を数値化する。その情報をリアルタイムで人間に伝えることで、擬似的ではないリアルな触覚を実現した。力加減は数値化されているので、操作する人間がいないロボット単体でも同様の動作・作業は可能である。
「視覚、聴覚、嗅覚、味覚、触覚という五感のうち、機械による再現が最も難しいのが触覚です。現在ある触覚マシンは皮膚に振動を与えるなどして『つかんだ気』にさせるものに過ぎず、ゲームには使えますが、実際に物を掴むとなると十分ではありません」と、野崎さんはリアルハプティクス研究の背景についてこう語る。
GP-Armの応用範囲は、医療、福祉、製造業など幅広く、様々な企業との共同研究や実証試験が進んでいる。大きさや硬さの異なるミカンの選別作業や、様々な種類のネジに対応する産業機械など、既にこのシステムを搭載している機械もある。伝える力を何倍にも拡大して重いものを軽々と動かしたり、動作を縮小して神経縫合のような微細手術(マイクロサージャリー)を行うなど、動作を縮小・拡大した応用も考えられる。
この技術を使って、触覚を持つ義手も開発した。当初は脇の下に操作レバーを装着することを考えたが、義手の被験者に試してもらったところ足指の感覚のほうが使いやすいと判明。右足の指で操作レバーを動かすと義手の指が同期して動き、義手が物に触れたり掴んだりする感覚は足の指で感じることができる。脳の命令で筋肉を動かす筋電義手よりも安価で、特別なトレーニングも必要ない。実験に参加した人によれば、「物に触れた感覚を感じることができる」ことが何よりも嬉しかったと言う。
「少子高齢化の進む日本では、労働人口の縮小が大きな課題となっています。特に医療や介護など人間を相手にする分野では、力加減が重要になります。製造現場を支える労働力として、高齢者の日常をサポートするロボットとして、これからの世の中に役立つ技術として活用されるでしょう」と野崎さんは語る。
2018年9月、野崎さん達はANAホールディングス株式会社と宇宙航空研究開発機構(JAXA)による宇宙関連事業の立ち上げを目指すプログラム「AVATAR X Program」に参加し、力触覚技術の宇宙開発応用に着手することを表明した。これまでの人類が体験したことのないリアルな体験の可能性は、宇宙にまで広がる。







No article or any part there of may be reproduced without the express permission of the Cabinet Office. Copyright inquiries should be made through this form.
© 2009 Cabinet Office, Government of Japan